联系电话:051683888399
17327370638
17327370638
Products display
我们是一家专业从事厂矿智能装备研发、制造与销售的高科技企业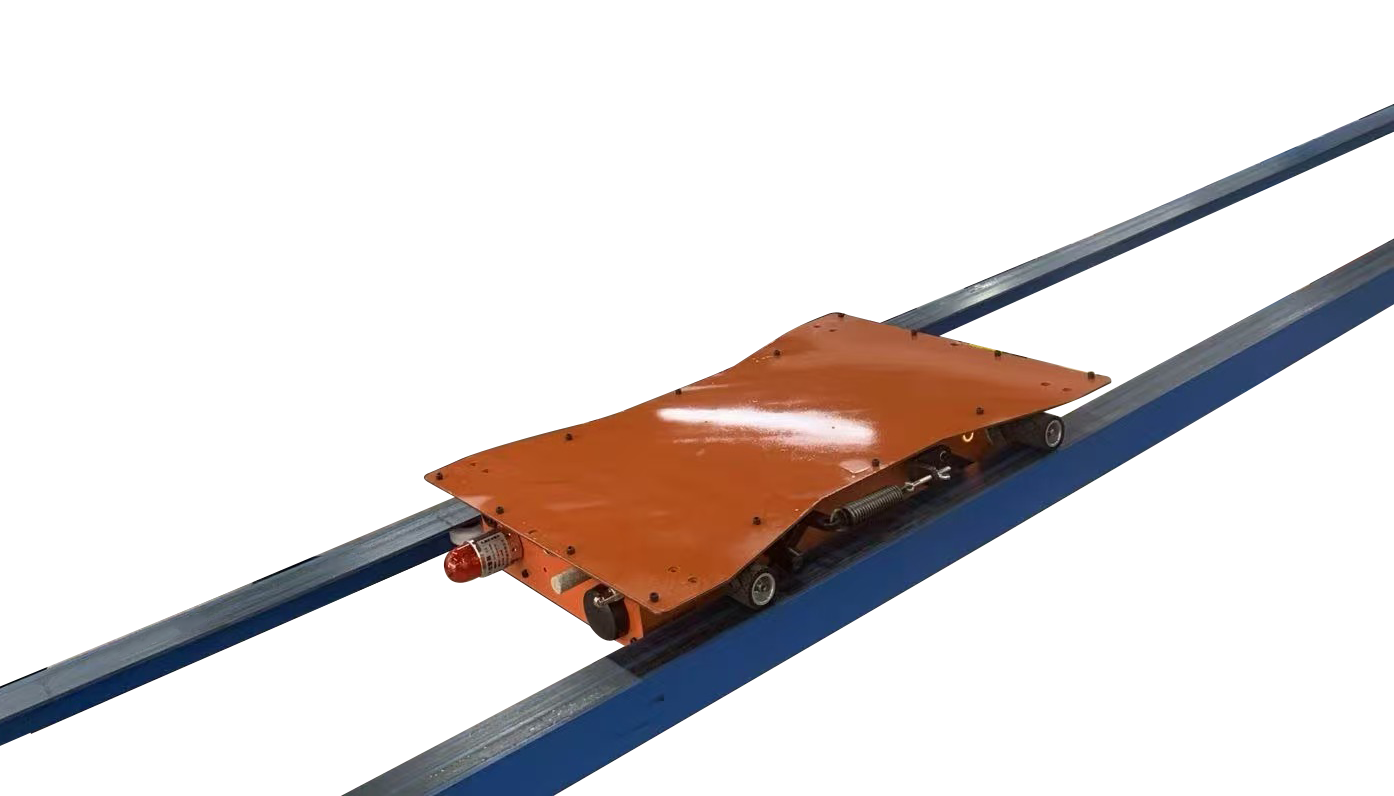
产品概述
趴轨式巡检机器人是一款专门针对长距离输送皮带机设计研发的智能巡检一体化机器人,适合各种长度的输送机使用。机器人运行在运输和返程皮带(上下皮带)之间,使得机器人有最佳的感测方位。使用图像算法处理技术和声音处理技术对托辊轴承温度、托辊酮体、托辊卡滞及皮带机损伤、撒料漏料、设备振动、设备异响等异常现象实现精准检测,释放人力劳动,减少人员安全隐患,提高巡检效率。
趴轨式巡检机器人搭载多种传感器,实时采集现场的图像、声音、温度、湿度、烟雾、有害气体、粉尘浓度等参数。具有智能识别功能,采用智能感知关键技术算法,能够准确判断设备当前运行状态,并基于大数据分析预警技术,对设备运行故障超前预判、预警,减少故障停机时间。
产品功能
声音采集系统:能从环境噪声中识别出异常声响,为轴承等关键零部件的损坏判断提供重要依据并进行故障检测与定位。
温度采集分析功能:机器人搭载红外热像仪,实时获取被检测设备的红外热像图,存储并分析被检测 设备的发热情况,预警温度异常。
移动图像采集功能:在低照度、高湿度和粉尘环境下,通过机器人上搭载的多个摄像机实现对巡检巷道沿线的图像采集。
环境检测功能:机器人上搭载有烟雾传感器、有毒有害等气体传感器等,实现巡检巷道的环境信息采集。
数据查询功能:机器人巡检实时状态、历史记录、异常记录等信息,通过上位机可以进行查询。
导航定位功能:独有的导航定位技术,可以使机器人定位报警更加精准。
自主避障功能:机器人避障系统可智能感知障碍物距离,具有视角大、响应快、灵敏度高的特点。
产品特点
趴轨机器人体积小,设计紧凑,适用于空间较为狭窄的环境。
机器人采用趴放在轨道上的运行方式,无需占用地面空间,不影响行人和其它设备运行。
采用先进的无线移动通讯技术,通讯距离远,抗干扰性强,保证图像及数据的实时传输。
采用多种检测方式及数据处理算法,能够实现多种智能化分析识别要求。
机器人搭载多种传感器,检测到设备故障或环境危险信息后,能够及时定位设备位置并在上位机界面报警同时将相关信息记录到后台软件。
产品可靠性高,易安装、易操作、使用便捷、维护简单、实现减员提效、减轻巡检人员的劳动强度,具有重要意义。
应用案例


某钢厂应用案例 某钢厂应用案例
如果您对我们的产品感兴趣,或者我们有什么可以帮助到您的,您可以随时拨打我们的全国客服电话:17327370638
您也可以在线与我们沟通,当然您也可以在下面给我们留言,我们将热忱为您服务!

 苏公网安备 32031102001433号
苏公网安备 32031102001433号